DISEÑO, CONSTRUCCIÓN Y CONTROL
DE UN ROBOT PARALELO DE TRES GRADOS DE LIBERTAD
Continuación...
CONTROL DE MOVIMIENTO
 |
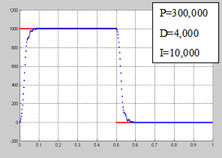 |
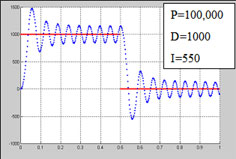
Figura 12.
Sintonización para un servomotor |
El primer paso para la validación
del sistema construido fue lograr el posicionamiento del
eje de cada servomotor según una referencia (señal
escalón). Para esto se llevó a cabo un procedimiento
de sintonización del control tipo PID para cada
eje. La referencia es una señal escalón
de 1500 cuentas (135°) para la posición angular
del eje de salida del servomotor, antes del reductor.
Tomando en cuenta la reducción de 100:1, este desplazamiento
corresponde a 1.35° en el giro del eslabón
superior. Las curvas de la figura 12 muestran el resultado
de la sintonización del PID para uno de los tres
servomotores. Se puede observar que el tiempo de respuesta
es inferior a 100 ms.
Con el fin de verificar el funcionamiento del robot y
del controlador se definió una trayectoria circular
en el espacio de trabajo de 50 mm de radio compuesta por
32 puntos interpolando con un polinomio de grado 5 para
obtener una trayectoria continua.
|
Figura 13.
Trayectorias: a) sin compensar, y b) compensada |
Los resultados obtenidos se muestran en
la figura 13a. Se puede apreciar un seguimiento deficiente
provocado por no considerar el efecto de la fricción
estática, (zona muerta para valores bajos de voltaje
de control) (Smith, 1995). La figura 13b muestra el resultado
de compensar la fricción estática según
el algoritmo presentado por Castillo (2001b). El efecto
de la dinámica del robot (Grotjahn, 2001) se desprecia
debido a la gran relación de reducción que
proporcionan los reductores armónicos.
Finalmente, para visualizar más claramente la trayectoria
del elemento terminal se instaló un apuntador láser
en la plataforma móvil, en posición vertical,
con el rayo luminoso apuntando hacia abajo, donde se colocó
una hoja blanca con un círculo impreso de 50 mm
de radio. Un sistema de adquisición de imágenes
puede permitir medir con suficiente precisión la
localización del centro de la plataforma móvil
y al mismo tiempo la calibración del mecanismo
(Renaud, 2006). Las fotografías de la figura 14
muestran algunas imágenes del movimiento, se puede
observar que el punto luminoso del apuntador láser
sigue efectivamente el círculo trazado en la hoja
blanca.
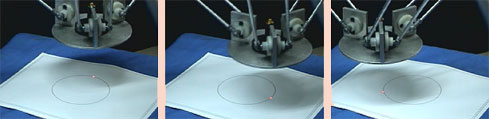 |
Figura 14.
Secuencia del seguimiento de trayectoria circular |
CONCLUSIONES
Se presentó el desarrollo completo de un robot
paralelo tipo Delta desde el diseño y construcción,
la integración de un controlador de arquitectura
abierta, y la programación y control de una tarea
de seguimiento de trayectoria circular. Los resultados
son muy alentadores y se proseguirá el estudio
de este tipo de robots en nuestra Universidad. El siguiente
paso es implementar tareas de muy alta velocidad (1 metro
por segundo) para explotar las ventajas de este tipo de
mecanismos. Además se integrará un sistema
de visión para la programación de tareas
de detección y manipulación de objetos con
localización no conocida. Por otro lado, se integrarán
algoritmos avanzados de control para reducir los efectos
del rozamiento mecánico en los reductores y la
holgura en las articulaciones esféricas, con el
fin de mejorar la precisión del movimiento.
Siguiente...

